
ترکیب
۱. موتور جریان مستقیم آهنربای دائم:
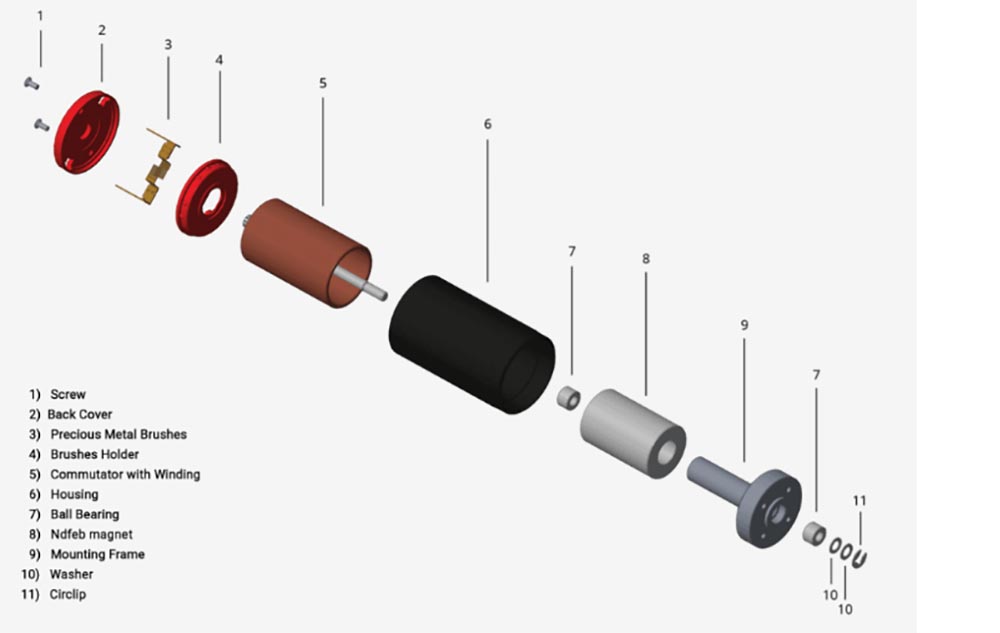
این شامل قطبهای استاتور، روتورها، جاروبکها، محفظهها و غیره است.
قطبهای استاتور از آهنرباهای دائمی (فولاد آهنربای دائمی)، فریت، آلنیکو، نئودیمیم آهن بور و سایر مواد ساخته شدهاند. با توجه به فرم ساختاری آن، میتوان آن را به چندین نوع مانند نوع استوانهای و نوع کاشی تقسیم کرد.
روتور عموماً از ورقهای فولادی سیلیکونی چندلایه ساخته شده است و سیم لعابدار بین دو شیار هسته روتور پیچیده شده است (سه سیمپیچ در سه شیار وجود دارد) و اتصالات به ترتیب روی ورقهای فلزی کموتاتور جوش داده میشوند.
جاروبک یک قطعه رسانا است که منبع تغذیه و سیم پیچ روتور را به هم متصل میکند و دارای دو خاصیت رسانایی و مقاومت در برابر سایش است. جاروبکهای موتورهای آهنربای دائم از ورقهای فلزی تک جنس یا جاروبکهای گرافیتی فلزی و جاروبکهای گرافیتی الکتروشیمیایی استفاده میکنند.
۲. موتور جریان مستقیم بدون جاروبک:
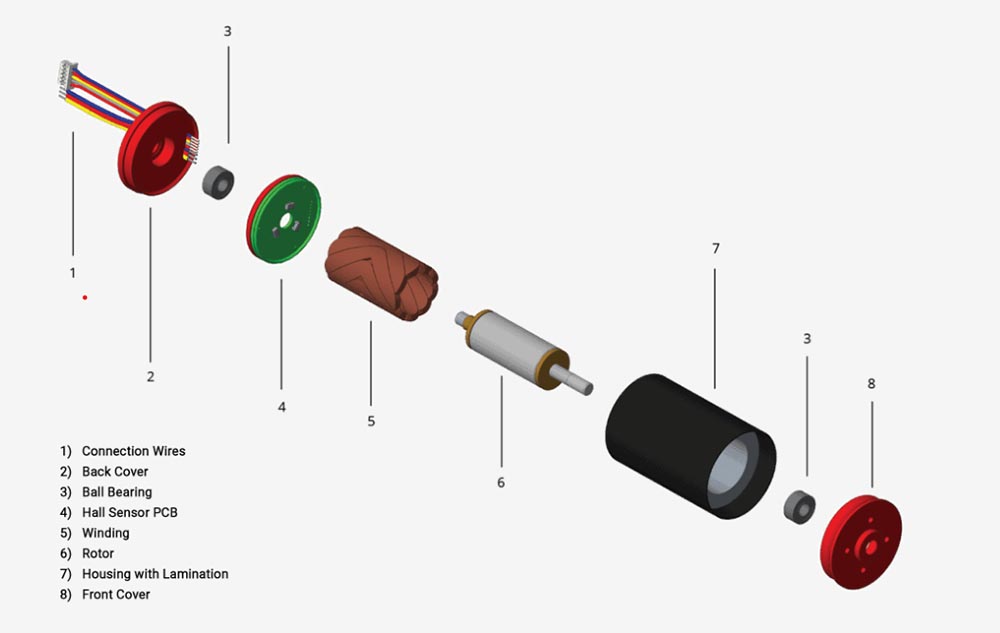
این موتور از روتور آهنربای دائم، استاتور سیمپیچ چند قطبی، سنسور موقعیت و غیره تشکیل شده است. موتور DC بدون جاروبک با ویژگی بدون جاروبک بودن شناخته میشود و از دستگاههای سوئیچینگ نیمههادی (مانند عناصر هال) برای تحقق کموتاسیون الکترونیکی استفاده میکند، یعنی از دستگاههای سوئیچینگ الکترونیکی برای جایگزینی کموتاتورهای تماسی سنتی و جاروبکها استفاده میشود. این موتور از مزایای قابلیت اطمینان بالا، عدم جرقه کموتاسیون و نویز مکانیکی کم برخوردار است.
سنسور موقعیت، جریان سیمپیچ استاتور را با توجه به تغییر موقعیت روتور، به ترتیب خاصی کموت میکند (یعنی موقعیت قطب مغناطیسی روتور را نسبت به سیمپیچ استاتور تشخیص میدهد و یک سیگنال سنجش موقعیت در موقعیت تعیینشده تولید میکند که توسط مدار تبدیل سیگنال پردازش و سپس حذف میشود. مدار سوئیچ قدرت را کنترل کنید و جریان سیمپیچ را طبق یک رابطه منطقی خاص تغییر دهید).

۲. موتور جریان مستقیم بدون جاروبک:
این موتور از روتور آهنربای دائم، استاتور سیمپیچ چند قطبی، سنسور موقعیت و غیره تشکیل شده است. موتور DC بدون جاروبک با ویژگی بدون جاروبک بودن شناخته میشود و از دستگاههای سوئیچینگ نیمههادی (مانند عناصر هال) برای تحقق کموتاسیون الکترونیکی استفاده میکند، یعنی از دستگاههای سوئیچینگ الکترونیکی برای جایگزینی کموتاتورهای تماسی سنتی و جاروبکها استفاده میشود. این موتور از مزایای قابلیت اطمینان بالا، عدم جرقه کموتاسیون و نویز مکانیکی کم برخوردار است.
سنسور موقعیت، جریان سیمپیچ استاتور را با توجه به تغییر موقعیت روتور، به ترتیب خاصی کموت میکند (یعنی موقعیت قطب مغناطیسی روتور را نسبت به سیمپیچ استاتور تشخیص میدهد و یک سیگنال سنجش موقعیت در موقعیت تعیینشده تولید میکند که توسط مدار تبدیل سیگنال پردازش و سپس حذف میشود. مدار سوئیچ قدرت را کنترل کنید و جریان سیمپیچ را طبق یک رابطه منطقی خاص تغییر دهید).
۳. موتور بدون جاروبک آهنربای دائم با سرعت بالا:
این موتور از هسته استاتور، روتور فولادی مغناطیسی، چرخ دنده خورشیدی، کلاچ کاهش سرعت، پوسته هاب و غیره تشکیل شده است. یک سنسور اثر هال میتواند برای اندازهگیری سرعت روی پوشش موتور نصب شود.
مقایسه موتورهای براشلس و موتورهای براشلس
تفاوت در اصل برقرسانی بین موتور براش و موتور بدون براش: یک موتور براش به صورت مکانیکی توسط یک براش کربنی و یک کموتاتور کموتاسیون میشود. یک موتور بدون براش به صورت الکترونیکی توسط یک کنترلر بر اساس سیگنال القایی کموتاسیون میشود.
اصل تغذیه موتور براشلس و موتور براش دار متفاوت است و ساختار داخلی آنها نیز متفاوت است. برای موتورهای هاب، حالت خروجی گشتاور موتور (چه توسط مکانیزم کاهش سرعت دنده کاهش یابد) متفاوت است و ساختار مکانیکی آنها نیز متفاوت است.
موتور دی سی براشلس بدون هسته
موتور جریان مستقیم بدون جاروبک بدون هسته
زمان ارسال: ژوئن-03-2019