موتورهای پلهای دندهاییک نوع محبوب کاهنده سرعت هستند که نوع ۱۲ ولتی آن به طور ویژه رایج است. این بحث نگاهی عمیق به موتورهای پلهای، کاهندهها و موتورهای دندهای پلهای، از جمله ساختار آنها، ارائه میدهد. موتورهای پلهای دستهای از موتورهای حسگر هستند که با تبدیل جریان مستقیم به یک جریان چند فازی و کنترلشده متوالی با استفاده از یک مدار الکترونیکی عمل میکنند. این فرآیند موتور پلهای را قادر میسازد تا کار کند. درایور، که به عنوان یک کنترلکننده متوالی برای چندین فاز عمل میکند، یک منبع تغذیه زمانبندیشده را به موتور پلهای تأمین میکند.
موتورهای پلهای، موتورهای کنترل حلقه باز هستند که سیگنالهای پالس الکتریکی را به جابجاییهای زاویهای یا خطی تبدیل میکنند. به عنوان یک محرک کلیدی در سیستمهای کنترل دیجیتال مدرن، آنها به دلیل دقتشان ارزشمند هستند. سرعت و موقعیت نهایی موتور توسط فرکانس و تعداد پالسهای موجود در سیگنال تعیین میشود و تحت تأثیر تغییرات بار قرار نمیگیرد. هنگامی که درایور پلهای سیگنال پالس را دریافت میکند، موتور پلهای را وادار به چرخش در یک زاویه تنظیم شده، که به آن "زاویه پله" گفته میشود، میکند و با گامهای دقیق و افزایشی حرکت میکند.
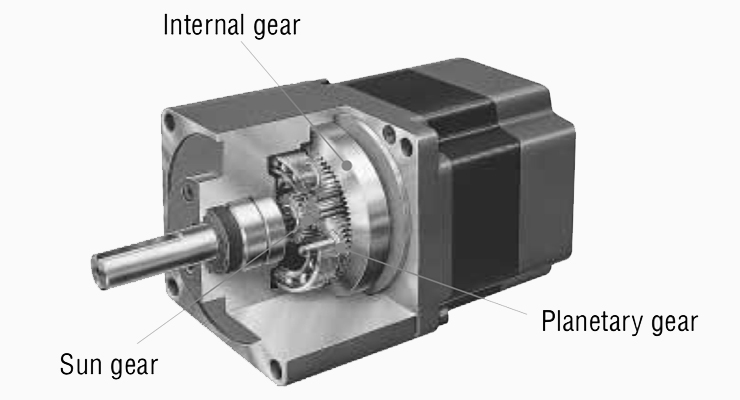
کاهندهها واحدهای مستقلی هستند که چرخدنده، حلزونی و گیربکسهای ترکیبی چرخدنده-حلقه را در یک محفظه محکم ادغام میکنند. آنها معمولاً برای کاهش سرعت بین اجزای متحرک اولیه و ماشینآلات عملیاتی استفاده میشوند. کاهنده، انتقال سرعت و گشتاور را بین منبع تغذیه و ماشین در حال کار هماهنگ میکند. به طور گسترده در ...ماشین آلات معاصر، آنها به ویژه برای کاربردهایی که نیاز بهعملکرد با سرعت پایین و گشتاور بالاکاهنده سرعت با درگیر کردن یک چرخدنده بزرگتر روی شفت خروجی با یک چرخدنده کوچکتر روی شفت ورودی، سرعت را کاهش میدهد. برای رسیدن به نسبت کاهش سرعت مورد نظر، میتوان از چندین جفت چرخدنده استفاده کرد که نسبت انتقال قدرت با نسبت تعداد دندانههای چرخدندههای درگیر تعریف میشود. منبع تغذیه کاهنده میتواند از یک موتور DC تا یک موتور پلهای، یک موتور بدون هسته یا یک میکرو موتور متغیر باشد که به چنین دستگاههایی موتور دنده DC، موتور دنده پلهای، موتور دنده بدون هسته یا موتور دنده میکرو نیز گفته میشود.

موتور پلهای گیربکسدار مجموعهای از یک کاهنده سرعت و یک موتور است. در حالی که موتور قادر به سرعتهای بالا با گشتاور کم است و اینرسی حرکتی قابل توجهی ایجاد میکند، نقش کاهنده سرعت کاهش این سرعت و در نتیجه افزایش گشتاور و کاهش اینرسی برای برآورده کردن پارامترهای عملیاتی لازم است.

هر بار که سیگنال تغییر میکند، موتور با زاویه ثابتی میچرخد، که این امر موتورهای پلهای را به ویژه در موقعیتهایی که نیاز به موقعیتیابی دقیق دارند، مفید میکند. تصور کنیددستگاههای فروش خودکارما همه جا میبینیم: آنها از موتورهای پلهای برای کنترل توزیع اقلام استفاده میکنند و اطمینان حاصل میکنند که فقط یک کالا در یک زمان میافتد.
موتور سینبادبا بیش از یک دهه تخصص در صنعت موتور دنده پلهای، به مشتریان خود طیف گستردهای از دادههای نمونه اولیه موتور سفارشی را ارائه میدهد. علاوه بر این، این شرکت در ادغام گیربکسهای سیارهای دقیق با نسبتهای کاهش سفارشی یا انکودرهای تطبیقی برای مهندسی سریع راهحلهای انتقال میکرو که کاملاً با نیازهای مشتری همسو هستند، مهارت دارد.
در اصل، موتورهای پلهای کنترل طول و سرعت حرکت را ارائه میدهند. تمایز بین موتورهای پلهای و موتورهای پلهای گیربکسدار در توانایی موتور پلهای در حفظ سرعت و دقت ثابت است که امکان تنظیم مدت زمان و سرعت چرخش را فراهم میکند. برعکس، سرعت یک موتور پلهای گیربکسدار با نسبت کاهش تعیین میشود، قابل تنظیم نیست و ذاتاً سرعت بالایی دارد. در حالی که موتورهای پلهای با گشتاور کم مشخص میشوند، موتورهای پلهای گیربکسدار گشتاور بالایی دارند.
تدوینگر: کارینا
زمان ارسال: ۱۹ آوریل ۲۰۲۴